
Возникла необходимость программно управлять 8-мью частотными преобразователями. Возможно ли реализация с помощью mach 3 или склонятся к МК и сводить все к USB или к нескольким COM. Принимаются любые советы, реализации, пожелания, ссылки на ПО и похожие темы.
Заранее спасисбо.
Контроллер для 8-ми частотных преобразователей
Модератор: koolhatcker
Re: Контроллер для 8-ми частотных преобразователей
whater, Все уже давно придумано. Обратите свой взор на промышленные частотники, которые управляются например по CAN шине.
Re: Контроллер для 8-ми частотных преобразователей
Обычные китайские с modbus по rs485 можно сотню с лишним на одну шину повесить.
Я не Христос, рыбу не раздаю. Но могу научить, как сделать удочку.
Re: Контроллер для 8-ми частотных преобразователей
UAVpilot, И вы тоже правы)
Re: Контроллер для 8-ми частотных преобразователей
А банально запараллелить управление? Только в качестве образцового +10В использовать только от одного инвертора.
Все получилось как нельзя как всегда.
Re: Контроллер для 8-ми частотных преобразователей
Sulfur, правильно сказали "банально". Подразумевается, что каждый частотник делает что-то свое, а не все тупо крутят с одинаковой частотой.
Re: Контроллер для 8-ми частотных преобразователей
А можно вопрос, зачем оно вам надо? Это не сарказм, мне правда интересно.whater писал(а):Возникла необходимость программно управлять 8-мью частотными преобразователями.
Re: Контроллер для 8-ми частотных преобразователей
Однако на эту мысль меня натолкнуло это:mhael писал(а):Подразумевается, что каждый частотник делает что-то свое, а не все тупо крутят с одинаковой частотой.
Мне почему-то подумалось про многошпиндельный станок для параллельной обработки.whater писал(а):Возможно ли реализация с помощью mach 3
-------
Я имею представление про CAN, Modbus, Profibus и прочие протоколы и способы. Но это другой уровень цен и оборудования. А ТС не сформулировал ТЗ полностью.
Все получилось как нельзя как всегда.
-
whater
- Станкостроитель

- Сообщения: 17
- Зарегистрирован: 23 апр 2013, 09:17
- Имя: Вячеслав
- Откуда: Абинск
Re: Контроллер для 8-ми частотных преобразователей
oxyum писал(а):А можно вопрос, зачем оно вам надо? Это не сарказм, мне правда интересно.whater писал(а):Возникла необходимость программно управлять 8-мью частотными преобразователями.
Если кратко, для управления волочильным станком. 1- размотка подачи проволоки, 6- волочение,1-намотка в бухту.
Про modbus c rs 485 тоже думал, но расскажите как это все свести к компу. С компьютерами я на ты, а вот с МК и их программированием возникают проблемы, как раз в плане программирования.
Краткое ТЗ необходими управление 8 трехфазными ассинхронными двигателями(6 -5,5 Квт, 2 -1,5-2Квт), причем управление подраземевает как всеми полностью, так некоторыми по отдельности, т.е при волочение могут использоваться на все 6, а только например 3 двигателя . Т.е. необходимо настроить маршруты волочения.
Re: Контроллер для 8-ми частотных преобразователей
К компу сводится через конвертор RS485-RS232 или RS485-USB.
Управлять можно как угодно, тут больше зависит от желаемого интерфейса и алгоритма.
Управлять можно как угодно, тут больше зависит от желаемого интерфейса и алгоритма.
Я не Христос, рыбу не раздаю. Но могу научить, как сделать удочку.
Re: Контроллер для 8-ми частотных преобразователей
whater
Мне кажется, тут компутером не отделаться. Волочение и намотка подразумевает контроль момента, а это не каждый "простой" инвертор может. И в таких применениях (регулировка момента) обычно применяются системы с обратной связью, т. двигатель с резольвером (энкодером) и инвертор с соответствующими входами. Если делать просто регулировку скорости, то систему с таким каскадом двигателей будет очень трудно сбалансировать.
В принципе, можно даже вообще без компа обойтись, если инверторы подключить цепочкой. У инверторов должен быть сигнальный выход, на котором напряжение меняется в зависимости от частоты оборотов (программируемая функция). Инвертор-"Мастер" (№1) задает скорость, следующий инвертор (№2) складывает сигнал от мастера со своим - частота повышается, следующий (№3) - по аналогичной схеме, только мастером для него является предыдущий (№2). И так до бесконечности. Но без регулировки момента процент брака может быть приличным, особенно на тонкой проволоке.
Это если я правильно понял процесс волочения.
Мне кажется, тут компутером не отделаться. Волочение и намотка подразумевает контроль момента, а это не каждый "простой" инвертор может. И в таких применениях (регулировка момента) обычно применяются системы с обратной связью, т. двигатель с резольвером (энкодером) и инвертор с соответствующими входами. Если делать просто регулировку скорости, то систему с таким каскадом двигателей будет очень трудно сбалансировать.
В принципе, можно даже вообще без компа обойтись, если инверторы подключить цепочкой. У инверторов должен быть сигнальный выход, на котором напряжение меняется в зависимости от частоты оборотов (программируемая функция). Инвертор-"Мастер" (№1) задает скорость, следующий инвертор (№2) складывает сигнал от мастера со своим - частота повышается, следующий (№3) - по аналогичной схеме, только мастером для него является предыдущий (№2). И так до бесконечности. Но без регулировки момента процент брака может быть приличным, особенно на тонкой проволоке.
Это если я правильно понял процесс волочения.
Все получилось как нельзя как всегда.
-
whater
- Станкостроитель
- Сообщения: 17
- Зарегистрирован: 23 апр 2013, 09:17
- Имя: Вячеслав
- Откуда: Абинск
Re: Контроллер для 8-ми частотных преобразователей
Да в принципе правильно, только комп я думаю все-таки понадобится, как раз для управление каждым последующим в зависимости от данных предыдущего.Sulfur писал(а):whater
Мне кажется, тут компутером не отделаться. Волочение и намотка подразумевает контроль момента, а это не каждый "простой" инвертор может. И в таких применениях (регулировка момента) обычно применяются системы с обратной связью, т. двигатель с резольвером (энкодером) и инвертор с соответствующими входами. Если делать просто регулировку скорости, то систему с таким каскадом двигателей будет очень трудно сбалансировать.
В принципе, можно даже вообще без компа обойтись, если инверторы подключить цепочкой. У инверторов должен быть сигнальный выход, на котором напряжение меняется в зависимости от частоты оборотов (программируемая функция). Инвертор-"Мастер" (№1) задает скорость, следующий инвертор (№2) складывает сигнал от мастера со своим - частота повышается, следующий (№3) - по аналогичной схеме, только мастером для него является предыдущий (№2). И так до бесконечности. Но без регулировки момента процент брака может быть приличным, особенно на тонкой проволоке.
Это если я правильно понял процесс волочения.
Двигателя стоят обычные трехфазные, без обратной связи. Просто немного предыстории, волочильный стан был заказан в одной из московских фирм(название пока не упоминаю, может еще одумаются). Механика была сделана процентов на 90-95%. Станок привезли на место. И люди пропали. Нет ни офиса(закрылся), ни нового адреса, на телефоны не отвечают. Руководство еще в раздумии, но уже намекнули, что закончив плазму, надо наверное чпушить волочильный стан. Вот и собираю пока информацию, изучаю ЧП, Modbus и иже с ними.
Так что рад любой информации. Похожий стан делают китайцы вот ссылка http://www.huafang.ru/proinfo.asp?whm=192.
Re: Контроллер для 8-ми частотных преобразователей
Вообще скорее всего вам придётся ставить энкодеры на все движки и делать realtime контроллер, который будет обеспечивать стабильность независимо от компа.
Скорее всего изначально надо было ставить сервы.
Скорее всего изначально надо было ставить сервы.
Re: Контроллер для 8-ми частотных преобразователей
whater
Поддерживаю предложение oxyum про сервы, как самое разумное.
Примерный набросок архитектуры;
1. Программируемый логический контроллер - в нем будет программа управления. Для примера - Mitsubishi FX2\3 (1500-2000$).
2. Панель оператора. В ней интерфейс управления. (500-2000$ в зависимости от нужной диагонали экрана)
3. Сервоприводы, т. е. инвертор+двигатель+энкодер. Например Omron-Yaskawa, как относительно недорогое и качественное решение. (2000-4000$ за единицу)
Надеюсь, цены не сильно испугают .
.
ЗЫ: - собирать на Siemens будет в разы дороже.
Поддерживаю предложение oxyum про сервы, как самое разумное.
Примерный набросок архитектуры;
1. Программируемый логический контроллер - в нем будет программа управления. Для примера - Mitsubishi FX2\3 (1500-2000$).
2. Панель оператора. В ней интерфейс управления. (500-2000$ в зависимости от нужной диагонали экрана)
3. Сервоприводы, т. е. инвертор+двигатель+энкодер. Например Omron-Yaskawa, как относительно недорогое и качественное решение. (2000-4000$ за единицу)
Надеюсь, цены не сильно испугают
ЗЫ: - собирать на Siemens будет в разы дороже.
Все получилось как нельзя как всегда.
Re: Контроллер для 8-ми частотных преобразователей
Сервоприводы тут не нужны, достаточно будет поставить на моторы дешёвые таходатчики для обратной связи.
А то и вообще датчики натяжения проволоки перед каждым приводом: ослабло натяжение - оборотов добавили, увеличилось - снизили.
А то и вообще датчики натяжения проволоки перед каждым приводом: ослабло натяжение - оборотов добавили, увеличилось - снизили.
Я не Христос, рыбу не раздаю. Но могу научить, как сделать удочку.
Re: Контроллер для 8-ми частотных преобразователей
Зачем вообще какие-то датчики? Нормальные инверторы и без датчиков управляют усилием в зависимости от потребляемого тока и без всяких датчиков. Например тот же Lenze.
-
whater
- Станкостроитель
- Сообщения: 17
- Зарегистрирован: 23 апр 2013, 09:17
- Имя: Вячеслав
- Откуда: Абинск
Re: Контроллер для 8-ми частотных преобразователей
mhael писал(а):Зачем вообще какие-то датчики? Нормальные инверторы и без датчиков управляют усилием в зависимости от потребляемого тока и без всяких датчиков. Например тот же Lenze.
Если можно в этом месте по-подробнее.
в конструкции станка, как заявлено на сайте производителя, используются именно Omron овские инверторы. Кто с ними работал, может в них есть реализация обратной связи. Т.е. смотрим ток на предыдущем двигателе
если (ток больше) > (какого либо значения) - увеличили обороты следующего иначе-уменьшили обороты самого двигателя
Re: Контроллер для 8-ми частотных преобразователей
У меня в обслуживании есть сервы Omron-Yaskawa. Именно сервы. Т. е. комплекс инвертор\двигатель\энкодер. Причем энкодеры программируемые. Станок по принципу похож на прокатный стан, в каскаде 4 привода, намотка отдельно еще 3 привода плюс тензодатчики. Именно прокат сделан по принципу, описанному мною ранее. На ПЛК (программируемый логический контроллер) сделан "мозг" системы, с панели оператора (ПО) выполняется управление. Принцип простой: на "цифровой" вход инверторов от ПЛК подается тактовая частота, которая рулится с ПО. Коэффициент удлинения регулируется как процент от базовой частоты. Стабильность оборотов обеспечивают собственно сервы. В случае перегрузки серв останавливается и сообщает мозгу об аварии, мозг останавливает весь станок. Связь между ПО и ПЛК по RS-485, связь между ПЛК и сервами без спецпротокола, простое логическое управление 0=0 вольт, 1=+24в. Преимущества - относительная дешевизна (по сравнению с системами на Siemens и Lenze), вменяемый и не монструозный софт для разработки и программировании, не нужно специальных переходников за безумные деньги (как у Siemens).whater писал(а):как заявлено на сайте производителя, используются именно Omron овские инверторы.
В моем случае обратная связь - энкодер.whater писал(а):может в них есть реализация обратной связи.
Практически на любом, самом дешевом инверторе (например Delta VFD-E) можно вывести на аналоговый выход любой параметр, в том числе и ток. В некоторых сериях Lenze есть возможность тактировать "по цифре". Но у Lenze очень запутанная технология программирования, и без хорошего бубна будет тяжело. У Delta проще - прочитал инструкцию и всё - ты уже профи.whater писал(а):Т.е. смотрим ток на предыдущем двигателе
-------
Регулировка по току не есть хорошо. Механика имеет свойство изнашиваться и барахлить. Отсюда точность будет довольно низкая.
--------
Если интересует, могу накидать схему "аналогового" управления (без ПЛК и ПО) на простеньких инверторах.
Все получилось как нельзя как всегда.
Re: Контроллер для 8-ми частотных преобразователей
Затем, что нужно регулировать не ток приводов, а усилие волочения, а между ними нет прямой зависимости.mhael писал(а):Зачем вообще какие-то датчики? Нормальные инверторы и без датчиков управляют усилием в зависимости от потребляемого тока и без всяких датчиков. Например тот же Lenze.
Я не Христос, рыбу не раздаю. Но могу научить, как сделать удочку.

Re: Контроллер для 8-ми частотных преобразователей
Поддерживаю на все сто!Sulfur писал(а):Регулировка по току не есть хорошо. Механика имеет свойство изнашиваться и барахлить. Отсюда точность будет довольно низкая.
В конце восьмидесятых, мы делали на работе чтото подобное для контроля натяжения. Принцип работы был взят с катушечного магнитофона, а сам датчик был позаимствован с "убитого" аппарата "Олимп 001" (некоторые потроха от него досихпор лежат в загашнике).
Вот здесь наверное он и есть, датчик:

Одиночный барабан на кронштейне, который с лева.
-
whater
- Станкостроитель
- Сообщения: 17
- Зарегистрирован: 23 апр 2013, 09:17
- Имя: Вячеслав
- Откуда: Абинск
Re: Контроллер для 8-ми частотных преобразователей
Да, если можноSulfur писал(а): --------
Если интересует, могу накидать схему "аналогового" управления (без ПЛК и ПО) на простеньких инверторах.
Re: Контроллер для 8-ми частотных преобразователей
whater
--------
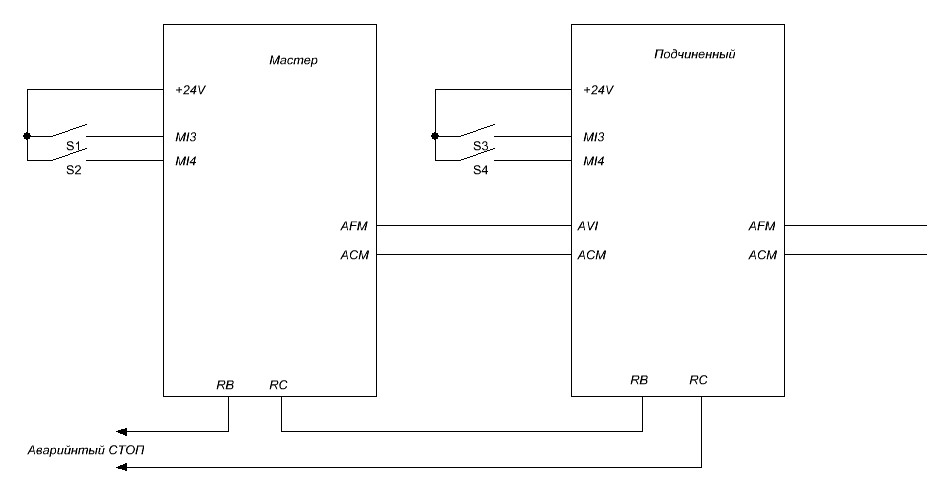
Покажу на примере инверторов Delta серии VFD-E, поскольку знаю их. Вам потребуется скачать мануал (7.1 Mb) к ним, для того, что бы не публиковать слишком много картинок.
Первый инвертор - "мастер". Схема подключения пуск\стоп - стандартная (по умолчанию).
Между первым и вторым вот такая схема подключения: Показать/Спрятать
Аналогично между 2 и 3, 3 и 4 и т. д.
Показать/Спрятать
Аналогично между 2 и 3, 3 и 4 и т. д.
Кнопки S1-S2 - скорость Вверх Вниз соответственно. Для каждого инвертора свои. Контакты реле RB-RC включены последовательно на всех инверторах.
По параметрам (ключевые значения) для мастера:
2.00 = 0
3.00 = 8
3.03 = 0
3.04 = подбирать.
4.05 = 10
4.06 = 11
Для подчиненных:
Тоже что и для Мастера, но дополнительно:
2.08 = подбирать. Скорость изменения частоты.
2.09 = 1
2.10 = 1
Остальные параметры (двигателя\защиты) не показаны и зависят от конкретного инвертора и\или двигателя. Рекомендуемый режим работы - векторный, т. к. лучше держит частоту при переменной нагрузке.
--------
Это просто набросок, для понимания идеи.
Предупреждаю сразу - система потребует ручной доводки и экспериментов. Требуемый результат не гарантирован. "Настоящее" решение возможно только на сервах и соответственно ПЛК\ПО. Но это уже серьезная работа и тут я Вам не помощник.whater писал(а):Да, если можно
--------
Покажу на примере инверторов Delta серии VFD-E, поскольку знаю их. Вам потребуется скачать мануал (7.1 Mb) к ним, для того, что бы не публиковать слишком много картинок.
Первый инвертор - "мастер". Схема подключения пуск\стоп - стандартная (по умолчанию).
Между первым и вторым вот такая схема подключения:
Показать/Спрятать
Кнопки S1-S2 - скорость Вверх Вниз соответственно. Для каждого инвертора свои. Контакты реле RB-RC включены последовательно на всех инверторах.
По параметрам (ключевые значения) для мастера:
2.00 = 0
3.00 = 8
3.03 = 0
3.04 = подбирать.
4.05 = 10
4.06 = 11
Для подчиненных:
Тоже что и для Мастера, но дополнительно:
2.08 = подбирать. Скорость изменения частоты.
2.09 = 1
2.10 = 1
Остальные параметры (двигателя\защиты) не показаны и зависят от конкретного инвертора и\или двигателя. Рекомендуемый режим работы - векторный, т. к. лучше держит частоту при переменной нагрузке.
--------
Это просто набросок, для понимания идеи.
Все получилось как нельзя как всегда.